Rviz
Oct 17 2021
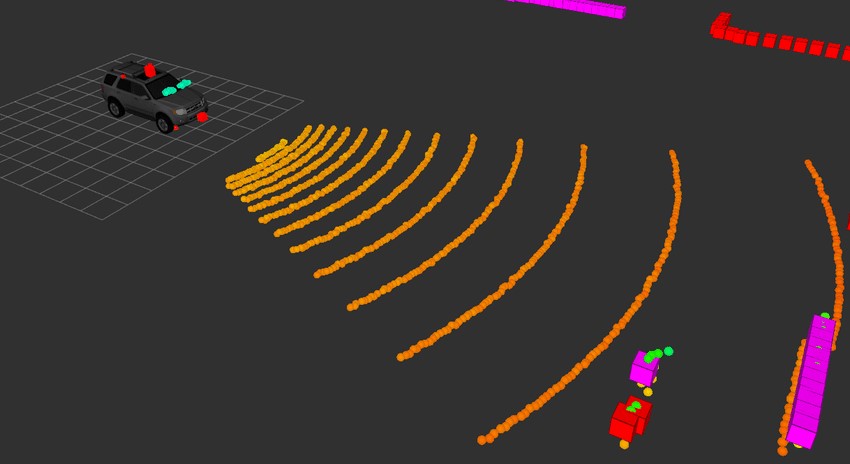
Rviz is a 3D visualizer for ROS that lets us view a lot about the sensing, processing and state of a robot.
This make the development of robots easier and also enables us to debug more efficiently (better than looking at numbers on a terminal :P)
Rviz vs Gazebo
Rviz is a visualizer i.e it shows what the robot perceives is happening while Gazebo is a simulator i.e. it shows what is actually happening.
Consider the scenario in which we do not have physical hardware-based robots. In that case we would use a simulator like Gazebo to know what would actually happen and the data from the sensors can be visualized in a visualization tool like Rviz. In case we have physical robots, then the data from the sensors can still be visualized in Rviz, but we do not need a simulator necessarily.
To get started with the installation and some beginner friendly example in Rviz, you may follow this link.